Projective Geometry
Mathematics behind projective geometry.
1. Alternative Interpretations of Lines
Represent it in dot product: An alternative definition of the dot product: This indicates that the vector is perpendicular to every point (x,y) in the plane, or the ray passing through the origin and the point
We can also define the line by its distance from the origin , and normal vector
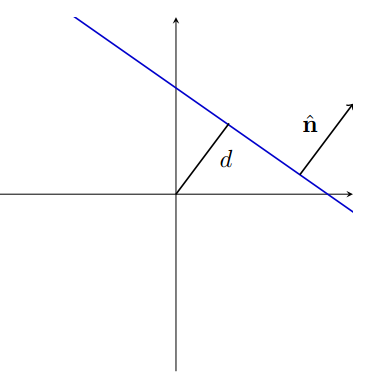
So a line can be represented as or
2. Point-line Duality
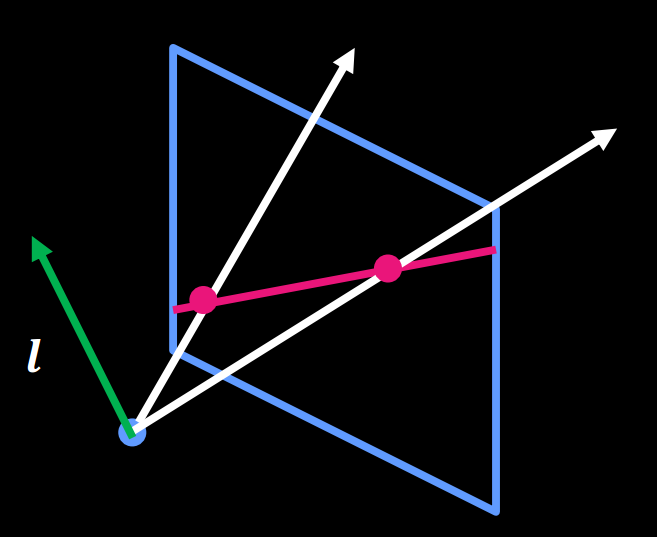
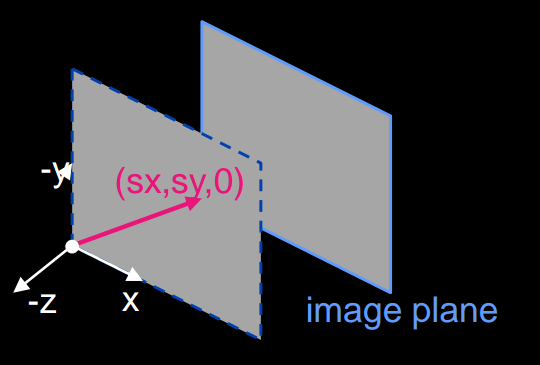
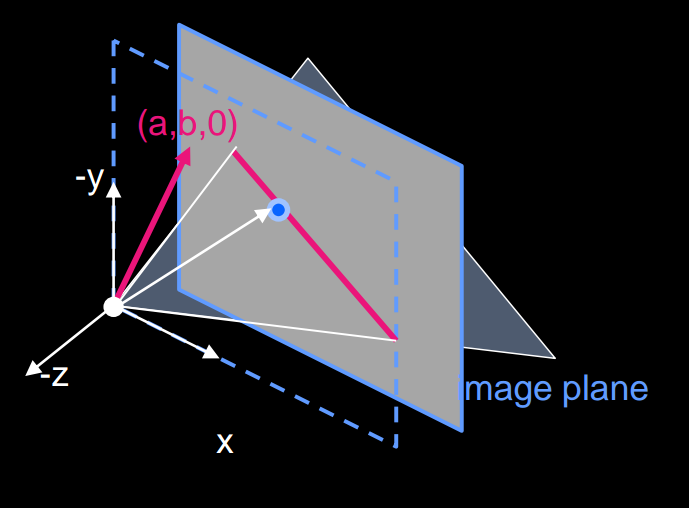
We can represent any line on our image plane by a point in the world using its constants. The point defines a normal vector for a plane passing through the origin that creates the line where it intersects the image plane.
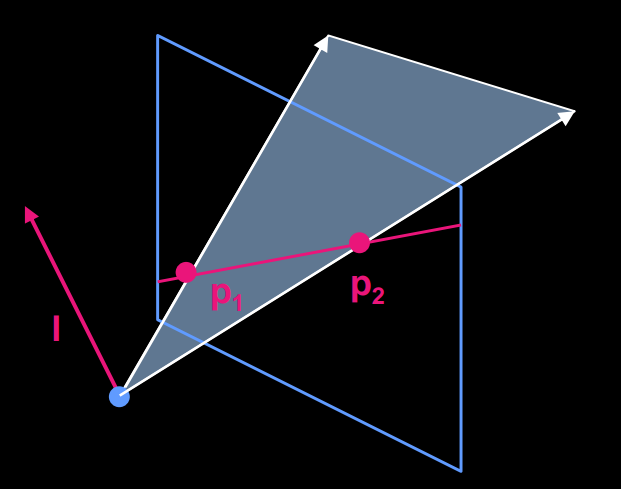
A line is a plane of rays through origin defined by the normal . All rays (x,y,z) satisfying:
3. Point and line duality
A line is a homogeneous 3-vector, it is perpendicular to every point (ray) on the line:
3.1 Points to line

3.2 Lines to Point
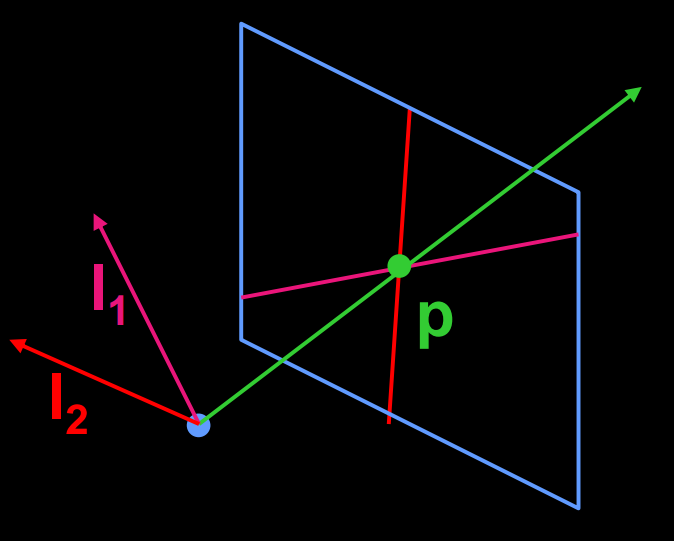
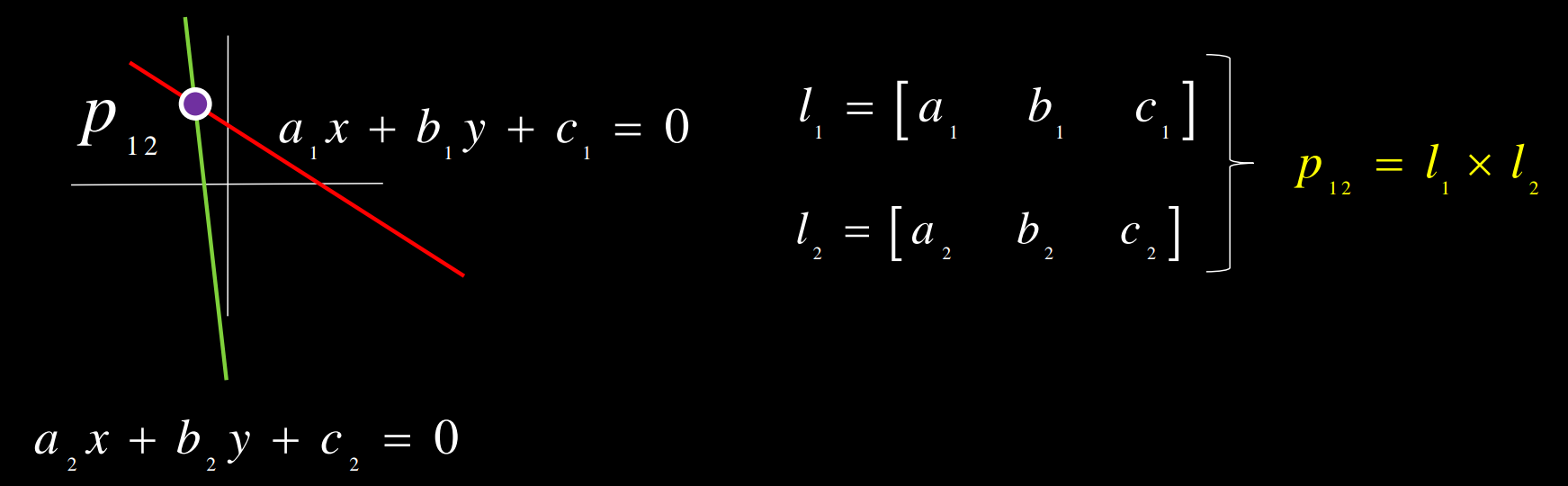
Points and lines are dual in projective space
- Given any formula, can switch the meanings of points and lines to get another formula
3. Ideal Points and Lines
3.1 Ideal Points
Point at infinity
- parallel to image plane. It has infinite image coordinates
3.2 Ideal Line
- normal is parallel to image plane. Corresponds to a line in the image (finite coordinates)
- Goes through image origin (principle point)
4. Duality in 3D
We can extend this notion of point-line duality int 3D
Recall the equation of a plane:
where is the normal of the plane, and for some point on the plane .
A plane is defined by a 4-vector , and so